
- IC�ͺ�
��ҵ����
- ���֤����

- ��Ա���ͣ���ͨ��Ա
- ������

- �绰��13661102955
- �ֻ���13661102955
- ��ַ������������������·529�Ž�������¥13D
- E-mail��2355647911@qq.com
��Ʒ����
RM3100����ͣ�����شŴ���������ԭ���㷨���༰�ŵ�PNI
����ʱ�䣺 2019/11/22 10:51:47 | 6926 ���Ķ�
��ǰ�ܶ�������ͣ���շѼ�ʱ��ȷ��ͣ����������Ա�Ǽ�ʱ����ֲ���ʱ�����ԴӲ��õشŴ�������ͣ���շѱ�ø�Ϊ����ÿ���г�������ͣ����λ���شŴ���������ʮ�����ڽ������볡��ʱ�䡢ͣ����λ��ŵ����ݣ�������ͣ������Ա���ֳ��ն˻���ͣ������Ա���Ը���ͣ����λ����ҵ���������ɳ�������Ϣ¼�롣����һ�����˽���ͣ�����شŴ���������ԭ�����㷨�����༰�ŵ㡣
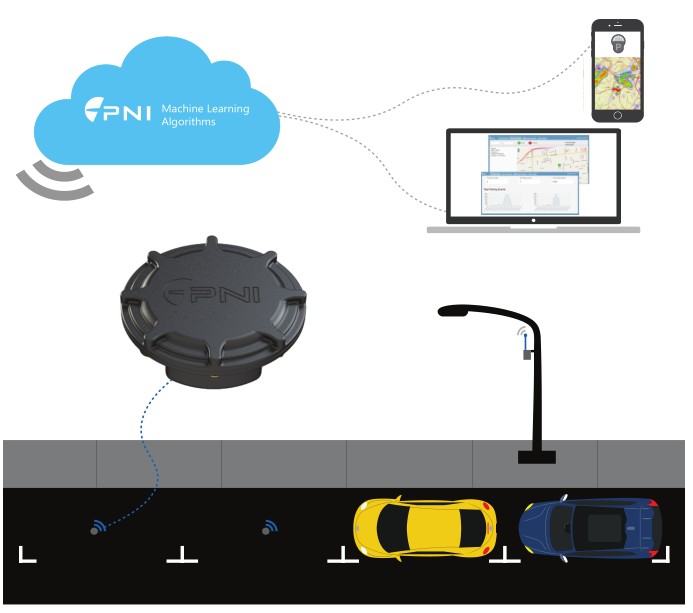
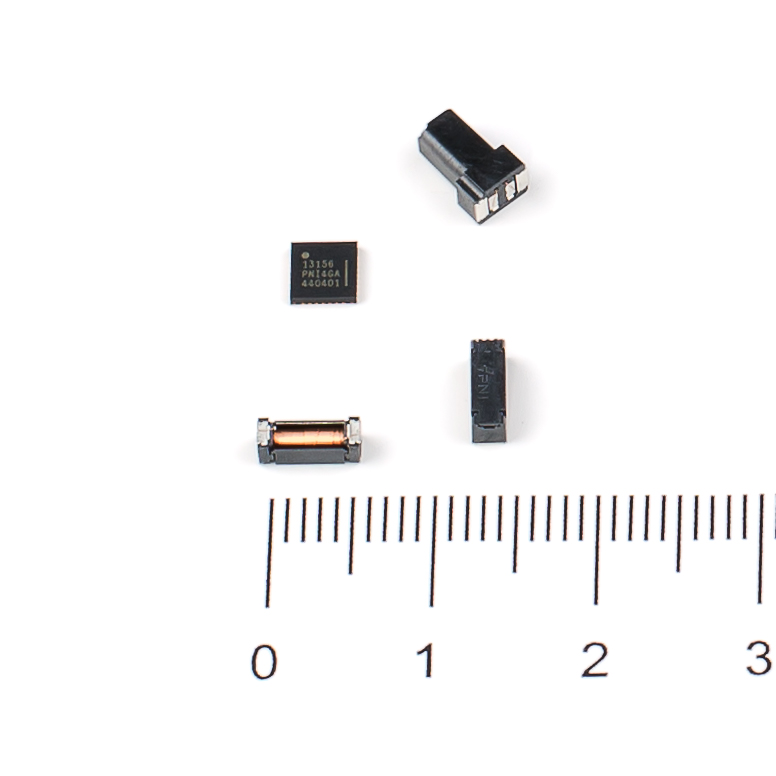
RM3100�Ŵ�����������2��X/Y��Ŵ�����Sen-XY-f(13104)��1��Z��Ŵ�����Sen-Z-f(13101)��1��ASIC������MagI2C(13156)��ɡ�10���ڻ����������ķֱ��ʺ͵���20����������ʹ��RM3100��Ϊ��ͬ���Ʒ�����ܵĴŴ���������֤�˺���ͷ�λ�������ԡ����ڴŸм�����PNI�����������߱����������µĸ߷ֱ��ʺ��ظ���������������Ҳ����ʸߡ���������Ҳ����Ҫ�����¶�У��
����ų���ǿ����0.5��0.6��˹������ų��ںܹ����������ڣ���Լ�������ǿ����һ���ġ��Ŵ������Ĺ���ԭ���ǵ�һ�����������壬Ҳ���������������ڴų��У���ʹ�ų������Ŷ��������ռ������ܲ������ų�ǿ�ȵı仯���Ӷ�������������Ĵ����Խ����жϡ��شŴ����������ڼ����Ĵ��ںͳ���ʶ�𣬱������ó���ͨ����·ʱ�Ե���ų���Ӱ������ɳ������ġ�
�γ�����ʱZ������ߣ������ߵ��ص��ǣ����������복��ƽ��ʱ���ַ�ֵ�����ڳ����ഫ����1Ӣ�ߵ������£��Ը����߽���ƽ������������ָʾ�����Ĵ��ڡ�ͨ���������ʵķ�ֵ�������˵��Ա߳����ij�����Զ���복�������ĸ����źš�

���������������Ϸ����Z����ų��仯�����������Ĵ��ڣ��������ڵ���һ�����ǹ۲�ų��仯�Ĵ�С��Ҳ���Ǽ���������شų�����������ʱ�Ĵų�ǿ�ȱ仯����������жϳ����������������ų��Ĵ�С����X^2+Y^2+Z^2��^1/2��
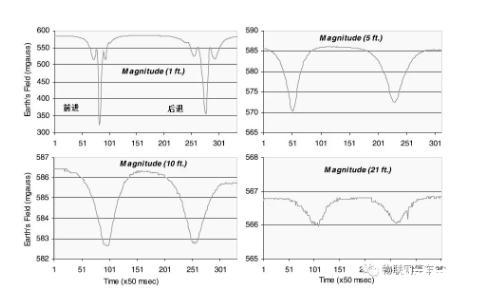
�Ŵ��������1Ӣ�ߡ�5Ӣ�ߡ�10Ӣ�ߺ�21Ӣ��ʱ��һ���γ�ͨ�������������ߡ��ڲ�ͬ�����£�Z���������״�����ƣ������ź�ǿ��ȴ����ͬ����1Ӣ�ߵ�5Ӣ�ߣ��ź�ǿ��˥���÷dz��졣����ԽԶ����ֵ����˥������������ֻ��ⵥһ�����������������������������Ĵ���ʱ�������ص�dz����á�
�Ӽ��ԭ������ʵ�dz���ͨ���Ŵ��������ų��ı仯����û��ʱ�궨һ�����ų�ֵ�����ų�Զ����ų�ʱ���ж�Ϊ�г����ų��ָ������ų�ʱ���ж�Ϊ�������Ϸdz����趨һ����ֵ����ֵ��ʾ�����ȣ������Ͼ���һ���شż�����㷨��
ͣ�����شŴ������㷨
��������㷨�ǵشŴ������ģ��������㷨̸�شŴ���������ˣ��å��
ÿ�ҵشŴ������IJ������㷨���㷨����ͬ���ֳ�������ȷ�ʡ���Ӧ�ٶ���ȫ��һ�����㷨�����һ�������ԭ���ԵĴų�ʶ����ʵ���ҾͿ�����ɼ��㷨�IJ��Թ�����������Ҫ�����㷨��Ҫ����ʵ����Ŀ�������������շ���Ŀ�ļ��飬������Ҫ������Ŀ��ǧ�������λ���Ҹ��ǹ������سǡ����м�����еĻ�����
ΪʲôҪ��ô�������أ���ΪС����ʹ���в��̫���»����������е��¶��ڿ��ˣ������ǵ����������ߵȸ��ţ���Ҷ�֪����ʹŵĹ�ϵ�������Ӱ��š��ܶ೧���ڽ���������Ʒʱ��˵��ijijС���У�С�س�������Ŀ��˵ʵ����ȫû�κβο���ֵ����Ϊ���ǵIJ��Ը���û���ǵ������ĸ��š�����һЩ���һ�˵���Dz�Ʒ��ij�����������յ����ǻ�����˼����˵���յ���������Ҫȷ�ʣ�����80%��װ����ʬ�嶼û�˹��ġ�
ǰ���ᵽͣ���شż��ԭ���Ǻܼ�����Ҫ��һ�����㷨��ô��ô�ѣ���Ҫԭ����һ�¼��㣺
1.���豸���Ҷ�λ�������شŲ�Ʒ�����豸��Ȼ��Խ����ݸ�ƽ̨����ƽ̨�������豸�������ݽ���ҵ�����̣���ô�������ˡ�һ�����ֲ�������ʱ��ƽ̨��˵�豸�����豸���У��豸��˵ƽ̨��ƽ̨���У����ᳶ��˵��Ӫ�����粻�еȣ�������Ƥ����Ϊƽ̨�����Լ����豸�������������������ݷ������㷨�Ż�������һ����ĿҲ�������κ��㷨�ϵĽ������Ż���ֻ����Լ����ڿӶ��ѡ�
2.������Ŀ���࣬������Ŀ�������࣬û��������Ŀ���ܶ೧�ҵ��豸�����϶���ʵ���Ҳ�Ʒ��������Ŀ�ϰٸ���λ��û�������ͳ�ȥ��ţ��������̤ʵ�أ��յ���һ��������Ŀ��λ������ǧʱ����¶��һ�����⣬��ʱ����ôȥ�ճ�������ʱ��ȥ�Ż��㷨���վ��ǿ���ҵ���������Լ���
3.�۵��з�ˮƽ���죬��Ʒ���з����з�ˮƽ��Dz�Ʒ�϶������á�
Ŀǰ�ڵش��㷨��������2�����һ��ǰ���㷨�����Ǻ�̨�㷨��
ǰ���㷨�ǰ��㷨���ڵشŴ������У�����Ӳ��������㷨���شŴ�����ͨ��һ����Ƶ�ʲ������ݣ������㷨������������ͨ�����߷�ʽ�ϱ����ֵ��������������DZ�Ե���㡣����Ҫ����ǰ���㷨�Ƿdz������ģ��ر����ڵ���Σ�����㷨��Ҫ�Ż�����Ҫȥ�ֳ�һ��һ�����µشŴ������ij�����ǰ�ڷdz�ʹ�ࣻһ���㷨�ȶ������ǰ���㷨���Գ�������ƣ�ȷ�ʸߡ���Ӧ�ٶȿ졢������С��ͬ������������֧�Ÿ����ģ�������ȡ�
�����㷨�ǰ��㷨���ں�̨��������������������ļ���ʽ�㷨���شŴ�������Ƶ�ʵIJ������ݣ�����Ҳ�Ǹ�Ƶ�ʵ�ͨ�������ԭʼ���ݷ�����̨������ѹ������Ķ���һЩ���õ�ԭʼ���ݶ����ǽ��ֵ����Ҷ�֪��Ҫ�����һ������϶���Ҫ�ܶ�һ������Ƶ���µ�ԭʼ���ݣ�ǰ���㷨ǰ�β�����ֱ�Ӹ�������������һ���������������С�����������㷨��Ҫ�������ԭʼ���ݵ���̨������ں�̨�����������˷���������Ӧ�ֲ�ʵʱ������������ݻ�Ҫ�ŶӵȺ����������㷨���㣬ֱ�Ӻ�̨�ģ���������ļ������Ų�λ�������Ӷ�������ӣ���������λ����û���⣬ǧ�Ѹ���λ����̱�����п��ܡ�
�������㣬�����㷨���в��ֳ��ҵشŴ���������û���������ˣ���ƾ���ÿ���Ӳɼ�1��ԭʼ���ݷ�����̨��һ����Ҫ����1440����Ҳ����˵��Ӧ�ٶ�����Ҫ1���ӣ����Ҫ30�뷴Ӧ�ٶȣ����͵�һ�췢2880�����ݣ�
�����㷨�л��в��ֳ��ҵĵĵشŴ���������дų��仯ʱ����Ƶ����ߵ�1-5���ڵģ���������10-20�����ݣ�ƽʱ����5-60���Ӳ���һ�����ݸ���̨������һ�컻��20�Σ��͵ôﵽ500-1000�����ݣ���ǰ���㷨������һ�컻��20�Σ�ÿ�λ���ֻ����ʻ���ʻ�룬����ƽʱ������һ����ֻҪ100���������ڣ����ֻҪ�����㷨��1/10�������������٣�һ��һ��ֻҪ1M�����������㡣
�Ƽ�ѡ�����ǰ���㷨�ĵشŴ�������ǰ������㣬���ھ����ɶ��ˣ�����ϵͳ�ɿ��ԣ�Ҳ��ʡ�����ѡ�
�شŴ�����������
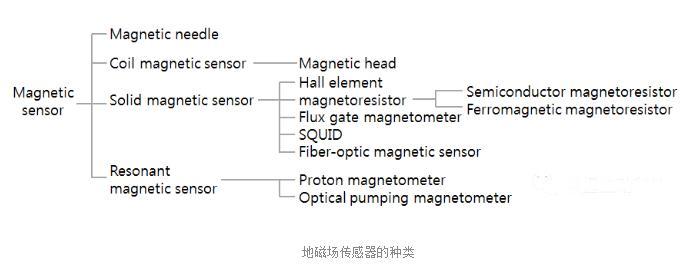
���м����źŹ��ܵ������������Դ���������Ȼ�кܶ���ʹ����������ĴŴ����������Ƕ���ѡ����ʹ�ø��ε����ԡ�����ͼ��չʾ�ľ��Ǹ��ִŴ���������Ҷ�֪������ָ������ָʾ�����Թ�����ʹ�ö�ľ��������Ŵ�����������(�i��)��Ȧ�Ĵ�ͨ��ʱ��仯������ĵ�ѹ�����ȣ��������ֻ���������������Ȧʽ�Ŵ����������ù����������ʴų��������ԣ����ֽ�������Ŵ�����������������״С���һ����ۣ��ܶ�ط����ڱ�ʹ�á��ź˹����������ڲ����ų������Ǹ���ԭ�Ӻ˵Ĵžغʹų�ʹ�ö�����ԭ���ܼ����Ŵ����������������ڲ����ų��ģ�Ҳ���ò������������ֻ�е���ȡ�
�شŴ��������ŵ㣺
���ǻ�ͣ��ϵͳ�У��شŴ��������ŵ������װ��ά���㣬��·���ƻ�С��ά��ʱֻ����شŴ��������ɣ����㲻�����ƻ�������·���ƶ�Ӱ�죻���õ���ų�����������ͨ��ʱ�ı仯����⣬��������Ӱ�죻ͨ�������������ã���ʶ�������������С���������жϳ��������ͣ��Է�����������û�з�Ӧ������Ч�ؼ�����졣
���Ͼ��ǹ���ͣ�����شŴ�����ԭ�����㷨�������༰�ŵ��֪ʶ���ܣ�ͣ������Ա��ӡ����СƱ�ϼ�¼�����볡��ʱ�䣬�ǵشŴ�������Ӧ����ʱ�䡣�������뿪ͣ����λʱ���شŴ�����Ҳ���Զ�ֹͣ��ʱ���ɴ˿������ֳ�ͣ�����شŴ������㷨�м��ȷ�ʺͷ�Ӧ�ٶȡ�
/**
*
Driver developed in HERMES project
*/
/**
*
@addtogroup I2C
*
@brief My I2C lib.
* @{
*
@file i2c.c
*
@brief An I2C lib for i2c
operations.
*
@details Change History:
*
************************************************************************
* | VERSION | DATE | AUTHORS | DESCRIPTION |
*
|:------------:|:--------------:|:------------|:-----------------------|
* | 1.0 |
25/8/2014 | MR | First Release |
* \n\n
*/
#include "i2c.h"
#include "hardware.h"
#include
/**
*
@brief Initialize i2c module:
* I2C
clock is BRG
* If
mode parameter is SLAVE, uses address to set slave address for the module
*
Enable module
*
@param[in] I2C_MODULE i2cnum
(use I2C1 otherwise is necessary to modify the functions)
*
@param[in] i2cmode mode (MASTER
or SLAVE)
*
@param[in] BYTE address for
SLAVE mode
*
@return none
*/
void i2c_init(I2C_MODULE i2cnum, i2cmode
mode, BYTE address) {
//enabling
i2c module doesnt need changing port
//direction/value
etc, and is not a pin muxed peripheral
I2CConfigure ( i2cnum,
I2C_ENABLE_SLAVE_CLOCK_STRETCHING);
I2CSetFrequency ( i2cnum, GetPeripheralClock(), BRG);
if(mode == SLAVE)
{
//address
mask is set to 0
I2CSetSlaveAddress ( i2cnum, address&0x7f, 0, I2C_USE_7BIT_ADDRESS );
}
I2CEnable(i2cnum, TRUE);
}
/**
*
@brief Write to device using
generic i2c protocol
*
@param[in] slave_addr - slave
address
*
@param[in] reg_addr - register address
*
@param[in] length - number of bytes to write
*
@param[in] *data - pointer for data to write
*
@return 0 if sucessfull, 1
otherwise
*/
int i2c_write(unsigned char slave_addr, unsigned char reg_addr, unsigned char length, unsigned char const *data) {
BYTE i;
StartI2C1(); //Send the
Start Bit
IdleI2C1(); //Wait to
complete
if (MasterWriteI2C1(((slave_addr<<1)|(0x00))))
return 1;
IdleI2C1();
if (MasterWriteI2C1(reg_addr))
return 1;
IdleI2C1();
for(i=0;i
if (MasterWriteI2C1(data[i]))
return 1;
}
StopI2C1(); //Send the
Stop condition
IdleI2C1(); //Wait to
complete
return 0;
}
/**
*
@brief Write to device using
generic i2c protocol
*
@param[in] slave_addr - slave
address
*
@param[in] reg_addr - register address
*
@param[in] length - number of bytes to read
*
@param[in] *data - pointer to where register data is to
be transfered
*
@return 0 if sucessfull, 1
otherwise
*/
int i2c_read(unsigned char slave_addr, unsigned char reg_addr, unsigned char length, unsigned char *data) {
BYTE i=2;
StartI2C1(); //Send the
Start Bit
IdleI2C1();
if (MasterWriteI2C1(((slave_addr<<1)|(0x00))))
return 1;
IdleI2C1();
if (MasterWriteI2C1(reg_addr))
return 1;
IdleI2C1();
StartI2C1(); //Send the
Start Bit
IdleI2C1(); //Wait to
complete
if (MasterWriteI2C1(((slave_addr<<1)|(0x01))))
return 1;
IdleI2C1();
I2CReceiverEnable ( I2C1, TRUE);
for(i=0;i
data[i] = MasterReadI2C1();
if(i<(length-1)) {
I2CAcknowledgeByte(MPU_I2C, TRUE);
IdleI2C1();
}
else {
I2CAcknowledgeByte(MPU_I2C, FALSE);
IdleI2C1();
}
}
StopI2C1(); //Send the
Stop condition
IdleI2C1(); //Wait to
complete
return 0;
}
Normal
0
7.8 ��
0
2
false
false
false
MicrosoftInternetExplorer4
/* Style Definitions */
table.MsoNormalTable
{mso-style-name:��ͨ����;
mso-tstyle-rowband-size:0;
mso-tstyle-colband-size:0;
mso-style-noshow:yes;
mso-style-parent:"";
mso-padding-alt:0cm 5.4pt 0cm 5.4pt;
mso-para-margin:0cm;
mso-para-margin-bottom:.0001pt;
mso-pagination:widow-orphan;
font-size:10.0pt;
font-family:"Times New Roman";
mso-fareast-font-family:"Times New Roman";
mso-ansi-language:#0400;
mso-fareast-language:#0400;
mso-bidi-language:#0400;}