
- IC�ͺ�
��ҵ����
- ���֤����

- ��Ա���ͣ���ͨ��Ա
- ������

- �绰��13661102955
- �ֻ���13661102955
- ��ַ������������������·529�Ž�������¥13D
- E-mail��2355647911@qq.com
��Ʒ����
����IMU��PNI�شŴ�����RM3100�Ľ������Ե���ϵͳ
����ʱ�䣺 2019/5/14 16:56:23 | 1566 ���Ķ�
ժҪ
����ּ�ڽ�������ʹ��ADI��˾�Ĺ��Բ�����Ԫ(IMU)������ ADIS16470��PNI�ĵشŴ�����RM3100�����Ľ������Ե���ϵͳ(SINS)��ʵ���˻��ڴ����������ʺ�����(MARG)��SINS��һЩ�������̣�����������̣��شŴ�������У��ʹ����չ�������˲���(EKF)����̬�ͺ���ο�ϵͳ(AHRS)�ͺ������١���ʵ����ʹ��ƽ�����(MSE)����������ϴ������ںϼ���������չʾ��ÿ�����̲���ʹ�õ��㷨��ʵ�����á����������˽��������������ߵ���ȷ�Եķ�����
���
���ŷ���������г��ͼ����ķ�չ�������ѳ�Ϊ�о���Ӧ���е�һ���ȵ㡣�복����������ɻ���ȣ�������������С���ɱ��ͣ�������ǵĵ���ϵͳӦ�þ��н����͵ͳɱ����ص㡣��ͳ���ȶ�ƽ̨����ϵͳͨ��Ҫ���ö����ļ��ٶȼƺ��˻������ǣ����д���������е�Ҹ��Եذ�װ���������ƶ��ij���������ȶ�ƽ̨�ϡ�����˳ߴ�ɿ��Բ�ɱ��ߵ�ȱ�㡣�෴���ڽ����ߵ�ϵͳ�У����Դ�����ֱ�ӹ̶��ڳ��������ϣ�����ζ�Ŵ��������복��һ����ת�����ֽ��������������ȶ�ƽ̨�ߵ���ȱ�㡣Ȼ����ƽ̨�ߵ���ȷ��ͨ������SINS��ƽ̨�ߵ��������Դﵽս�Լ���0.0001��/ʱ��������ƫ�ã�1��g�ļ�����ƫ�ã�����ü���0.005��/ʱ��������ƫ�ã�30��g�ļ�����ƫ�ã���������SINSֻ�ܵ��ﵼ������0.01��/ʱ��������ƫ�ã�50��g�ļ�����ƫ�ã���ս������10��/ʱ��������ƫ�ã�1mg�ļ�����ƫ�ã������ڴ������������˻�AGV����Ӧ�ã���һ�㹻�ˡ�
���������ܶ࣬���������Ӿ���GPS��UWB��SLAM�ͼ����״�ȡ�����IMU�Ĺ��Ե���ʼ���ǵ�������Ҫ��ɲ��֡�Ȼ�����������ִ����������ơ�������ƫ����������������ر�����ƫ���ȶ��ԡ������Ե���ͨ����Ҫ����һ����鴫����������Ϊ���ṩ�ο���У�����Ľ����������Ϊ�������ںϡ����ഫ������������IMU�ںϣ���������ͷ����̱���������Щ�������У��شŴ�������һ�ֵͳɱ��ķ���������IMU��ϻ����̬��Ϣ��
�ڱ����У�����ʹ��ADI��IMU ADIS16470�͵شŴ�����������ƽ̨���㷨��ʵ�ֽ������Ե���ϵͳ�����ǣ��شŴ�����ֻ���ṩ��̬��Ϣ�����ں�λ�����������������ֻ��ʹ��IMU�еļ��ٶȴ�������
ADIS16470 IMU���
ADI��˾��ADIS16470��һ����MEMS IMU��������3�������Ǻ�3����ٶȼơ�����������ƫ�ȶ���Ϊ8��/ʱ�����ټ���ƫ�ȶ���Ϊ13��g ��ؼ���������������У�����⣬ADIS16470��
�ͼ۸���ͬ����Ʒ�о������������õ�������ͻ��Ĺ㷺ʹ�á��ڱ����У�����ʹ����������ADIS16470ͨ��SPI�ӿڽ���ͨ�š�
�شŴ���������
�شŴ����������ڲ������������꣨������ϵ���еĵشų��Ĵ���������Ϊ�����ṩ�ο�����x��y��z����ֵ�ɱ��صشų�ͶӰ���������ִ�������������Ҫȱ�㡪��һ�Ǻͷֱ��ʲ��ߡ������磬���õĻ���Τ�����̴�����HMC5883L�ķֱ��ʽ�Ϊ12λ����һ��ȱ���Ǵ����������ܵ���Χ�����ĸ��ţ���Ϊ�شų��dz�����ǿ�ȷ�ΧΪ����˹��8��˹��
��������Щȱ�㣬��Ȼ���������������ʹ�ã����继�⡢��EMI�����ȡ����شŴ�������IMU��������ϣ��Ϳ����ڴ����������ʹ�����ഫ������
�ڱ����У�����ʹ��PNI��������˾�ĸ����ܵ������̴�����RM3100�����ṩ��24λ�ֱ��ʡ�PNIʹ����������������߿�����������
���̴�������У
��ʹ�����̴�����֮ǰ����Ҫ�������У������������Ҫ��һ����ʧ������ԭ�����ɴ������͵�·��ʧ���������ġ���һ���DZ�����������������ܵ���Χ�Ż����ĸ��š����磬�����һ��x������ⲿ�ų�ʩ�ӵ��������ϣ��ͻ�����ⲿx��ʧ����ͬʱ��x����Ҳ����y���z�ͬ��
ͨ������У�Ŵ������ķ�������xyƽ����ת����������Ȧ��Ȼ���ȡ���ݡ�һ���ص�ĵشų�ǿ����һ������ֵ����˻��Ƶ�����Ӧ����һ��Բ��Ȼ������ʵ�ϣ����ǽ�����һ����Բ�Σ�����ζ��������Ҫ�ƶ���Բ���������ŵ�����Ϊ���ĵ�Բ��
����2DУ������һЩȱ�㣬������Ҫ�ü���������������б�ȡ�����ʹ��3D������Ϸ�����У���̴����������ȣ�������Ҫ����������ת��x-y-z�ռ��е�ÿ��������3D�����л�����ֵ��Ȼ��������Ҫʹ��ƽ�����(MSE)�������������Ϊ�����档
���̿��Ա�ʾΪ
���У�X��Y��Z��������������������ϵĵشŷ���������Щֵ���Ϊ��������ζ�ţ�������Ҫ�õ�һ��ϵ���⡣���ǽ�ϵ������Ϊ��
�����ʱ�����Ƕ���������
����������Ҫ����ң���ʹ�ù�ʽ2���ҳ�ֵ��
�������ǾͿ��Եõ�ͼ1��ʾ����Ͻ����
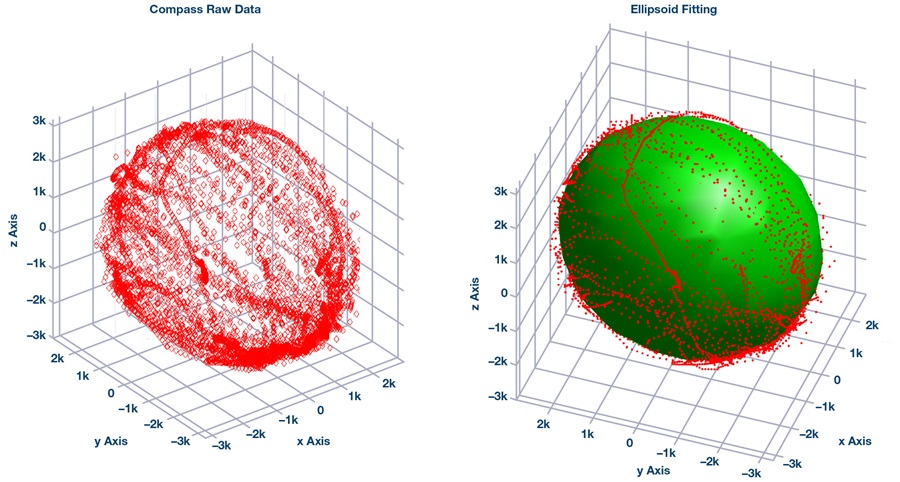
ͼ1. ԭʼ�������ݷֲ�����ʹ��������Ϻ���������ݣ��ң���
Ϊ��У��������������Ҫ�����ѹ����ϵ������沢������������Ϊ���ĵ������ϡ�����ʹ�þ�������ֵ�ֽ�(SVD)��������������У��У���������ͼ2��ʾ��1,2
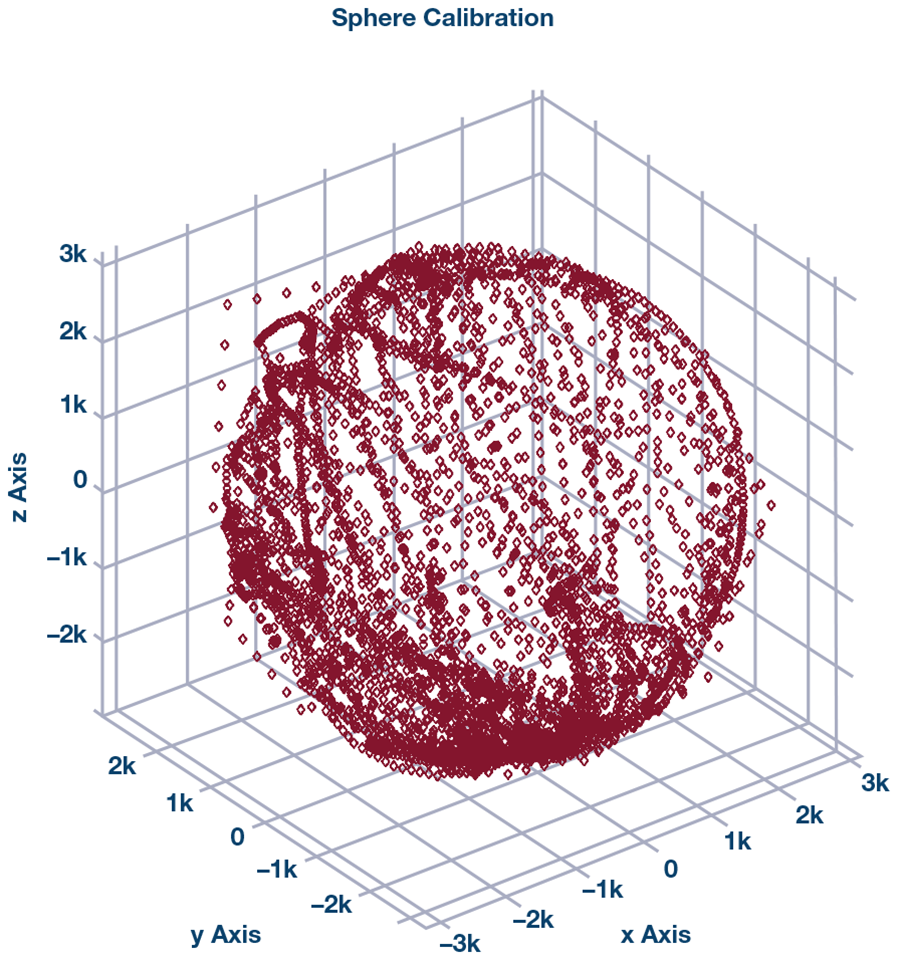
ͼ2. ��SVD������������У����������ݡ�
У�����ǿ��Կ�������õĴų�ǿ�ȣ���뾶�������㶨���䣬��ͼ3��ʾ��
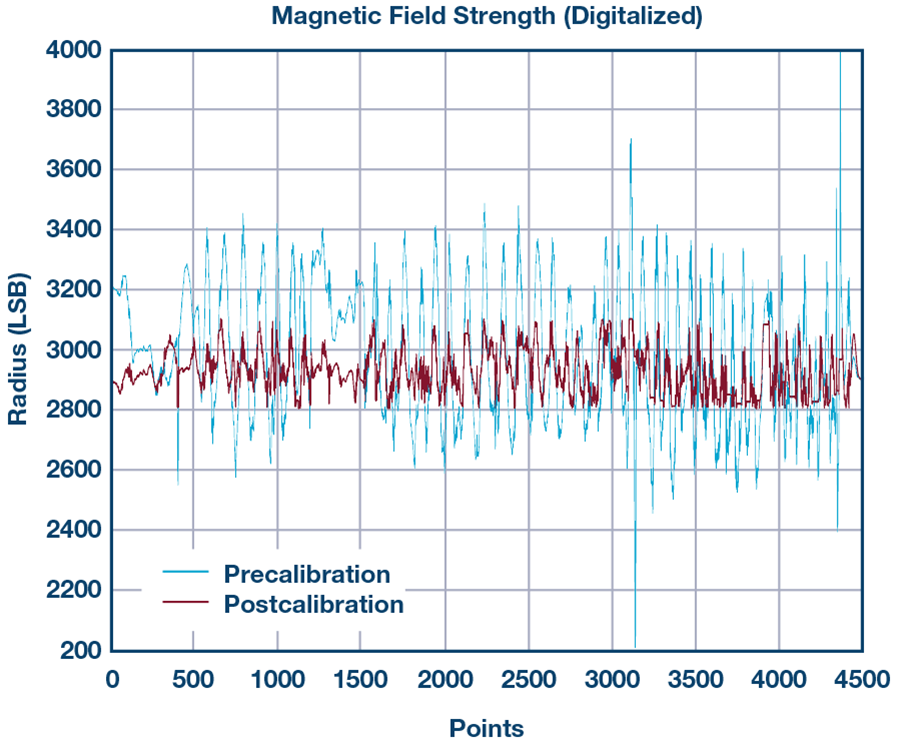
ͼ3. Уǰ��У��Ĵų��Ƚϡ�
ʹ��ADIS16470�����̵���̬�ͺ���ο�ϵͳ
AHRS���������ϵĴ�������ɣ��ṩ��̬��Ϣ����������ǡ������Ǻ�ƫ���ǡ�AHRS��һ�����Էɻ������ĸ����������������������̬��
�ڽ������ǵķ���֮ǰ���б�Ҫ���Ƚ���Ϊʲôȷ����̬��Ҫ�����ںϡ���ʵ�ϣ����ǵ�ϵͳ���������ִ������������ǡ������������̣�RM3100�شŴ���������
�������ṩΧ�Ƹ������ת���ٶȡ�ͨ�������ʻ��ּ��㣬���ǿ��Եõ���ת�Ƕȡ��������֪����ʼ����ͨ���ǶȾ�ʼ���ܹ��õ�������̬�����ֽ��ۻ������ǵIJ��ȶ���ƫ���⽫���½Ƕ������⣬���������ǵĸ�˹�ֲ����������ֳ�һ�������˶����̣������������������ˣ����Ǻ��ѳ�ʱ��ʹ�������ǣ���������Ҫ����У��
���ٶȼ��ṩÿ���᷽����ƶ����ٶȡ��ھ�̬״̬�£����ǿ��Եõ�ÿ�������������ٶ�֮��ĽǶȡ������������ٶ��ڷ����ֵ�Ϻ㶨���䣬���ǿ��Ի���������������ĺ�����̬��Ȼ�����÷���ʹ���������ٶ���Ϊ�ο�����˲��ܽ��Χ���������ٶ���ת�ĽǶȡ�
�����ṩ�ӵشų�ͶӰ��ÿ�����ֵ�����ǿ��Դ�ÿ�������Ϊ���������ĵشų�����֮��Ĺ�ϵ�Ƶ����Ƕ�ֵ����ǰһ�����������ڶ��ⲿ�ų��Ŀ����Խϲ������Ҫһ�����ŵĻ�����
����һ�����У����ǿ��Կ��������ѿ�һ�����������ҵ���̬��������Ҫ���ʹ������������������������Ϣ�ں������������ü��ٶȼơ������Ǻ͵ش����̲�����̬�������ں�Ҳ����Ϊ�š������ʺ�����(MARG)ϵͳ��
��չ�������˲���������봫�����ں�
�ж��ַ������Խ�IMU�����������ں����������绥���˲�����ͳ��ѧARMA�˲������������˲����ȡ������ڱ�����ʹ�õ�����չ�������˲�����
���ȣ�������Ҫ���ܱ�����ʹ�õ�һЩ���塣
���궨��
T����������������꣨������ϵ��֮��Ĺ�ϵ��һ���������ڱ仯����һ�����걣�ֲ��䡣�������궨�巽��������ʹ�õ�������������ꡣ�붫����(NED)����ϵ����������෴�����ǽ������ij�ʼ������ֵ����Ϊ��������ϵ���˺������Ϊ�㶨���ꡣ�������굽���������ӳ�䣨ͶӰ��������Ϊ��̬������ŷ���ǻ������Ҿ���(DCM)��ͬ������������ʹ����Ԫ��������Ϊ�����ڵ����Ա��������ԡ�
�ÿ������˲���������̬
�����ڱ�����ʹ�õ��˶�ѧ���̣���״̬ת�Ʒ��̣��Ƿ������ַ��̣������Ҫʹ��һ��EKF�����ڶԸ��ַ��̽���һ���ơ�����EKF��ƣ����Ƕ���
һ��1��7������Ϊ״̬����������
Ϊ�����ʣ�
Ϊ��̬��Ԫ����
һ��1��7������Ϊ�۲��������״̬����������ͬ�ķ�����
һ��7��7������Ϊ״̬ת�ƾ������У�A�IJ����ǽ����ʵ����ֻ��ַ��̣��ڶ����������ֻ���Ԫ�����·��̣����ߴ��˶�ѧ�����Ƶ�������
һ��7��7������Ϊ�۲����
Ϊ���Э�����������һ��7��7�������й������� x̂��ʵֵxx֮�����������ڲ����н���ʼ�����Ϊ��Խ�С��ֵ����ֵ���Զ�������һ��Сֵ��
����Ϊ״̬ת�������۲�������Э����������ǵõ����ǵij�ʼֵ��
�ڱ���IMU�����̴��ھ�ֹ״̬��ͬʱ��ͨ�����������Ǻͼ������Ľ���������ֵ��ƽ���õ���������
�������϶��壬�������˲�����ͨ���������������ɣ�
����1��ʹ�ù�ʽ3���㿨��������K
����2����������������P:
����3���������״̬x̂:
����4������״̬x̂�C:
����5����������������P�C:
�ù��̿��Լ�����Ϊͼ4�еĿ�ͼ��
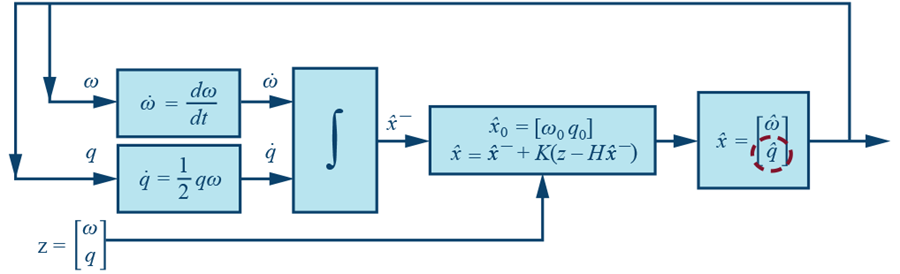
ͼ4. ���ڸ�����̬�Ŀ������˲�������ͼ��
����MSE�Ĵ������ں�
����һ���У��۲����������û���������̵���Ϣ�����ڦ��ǽ����ʣ�����ֻ��ʹ����Ԫ����������������q. ����ʹ��MSE�������q, ���۲�����е���֡�
���ǽ��������������£�
mb��ab: ������ϵ������̴�ֵ�ͼ��ٶ�ֵ��
mn��an: ��������ϵ������̴�ֵ�ͼ��ٶ�ֵ��
mn0��an0: ��������ϵ��ij�ʼ��̬���̴�ֵ�ͼ��ٶ�ֵ��
Ϊ��������ϵ����������ϵ����̬ת����������Ԫ����ʾ������д��
������˵�������ϵ�г�ʼֵ��ʵʱ��������ϵӳ�䵽��������ϵ��ֵ֮������š�
����֮ǰ�Ķ��壬MSE������������ȡֵ��
ͨ����8��ֵ��
��f(q)��ʹ������㣬
���ǽ���÷��������ϵ�q������ʹ�ø�˹-ţ�ٷ�������һ���ݶ�������������Ϸ����Է��̡�
ͨ����Ͻ����ʣ����ǽ��õ��۲����
�����ں��˿������˲����е��������ݺ�IMU���ݡ�
�ù��̿��Լ�����Ϊͼ5�еĿ�ͼ��
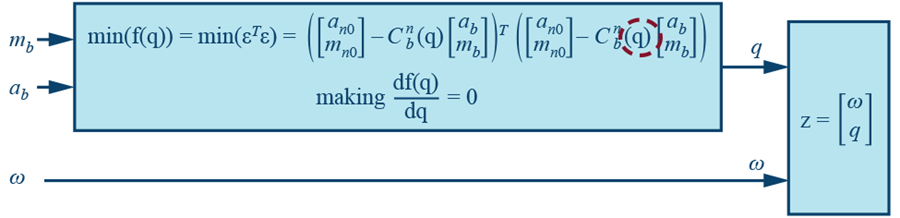
ͼ5. ʹ��MSE�����Ĵ������ںϿ�ͼ��
�����
��ǰ���������Ǿ���������ʹ�����̴����������������������ܵ����ţ���������̬���Ƚ�ʹ��IMUʱ�����ˣ�����ʹ����������жϴŴ������Ƿ���á����Ŵ�����������ʱ������ֻ��IMU�������̬�����Ŵ���������ʱ�����ǽ�ʹ���ں��㷨�ҵ���̬����ͼ6��ʾ��
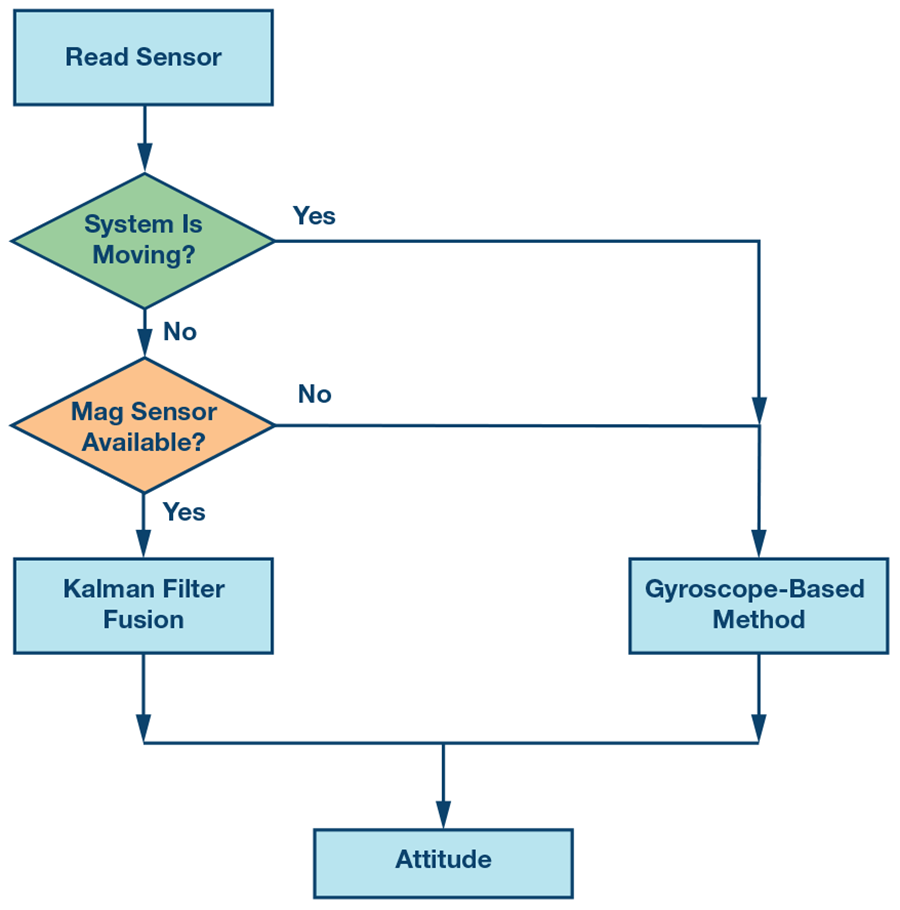
ͼ6. ��̬��������ͼ��
�ڻ��������֮�����������µ���̬ʱ����ijЩϵͳ�У�������������̬�������ڲ�ͬ���������ڴ˴����е��ǵ��������ڽ��㣩�����Ǽ�����ٶȵĴ�С��������������1g, ���ǾͲ���ʹ�ü����������������̬���㡣Ȼ�����Ǽ�����������Ĵ�С���������ʼֵ���бȽϡ�������DZ˴˲���ȣ����ǾͲ����ڴ�������ʹ�õشŴ����������ݡ���������������ʱ�����ǻ�ʹ�ÿ������˲�����ִ��MSE�ںϡ�
ʹ��ADIS16470���к�λ����(DR)
�ڵ����У���λ�����Ǽ��㵱ǰλ�õĹ��̣���ʹ����ǰȷ����λ�ã�Ȼ���ڽ��������л�����֪����Ƶ��ٶȻ���ٶȸ��¸�λ�á����ォʹ��ADIS16470��ļ��ٶȼơ�������һ�ڽ������̬�����ǿ��Եõ�����ϵͳ���ƶ�����Ȼ����Ҫ����÷����ϵľ��룬ȷ��λ�á�
������λ������Ҫʹ�û��ڼ��ٶȲ����ı�������������INS��λ�á��������̿��Լ�����Ϊ��ʽ10����ʽ11�͵�ʽ12��
����ae�ǵ�������ϵ��ļ��ٶȣ�ab ��������ϵ��ļ��ٶȣ�ve�ǵ�������ϵ����ٶȣ�se�ǵ�������ϵ��ľ��룬ge �ǵ�������ϵ�����������Ϊ[0 0 1]����λΪ g����Ҫǿ�����ǣ���������ϵ�뵼������ϵ��ͬ������������ϵ�ǻ���NED�ġ��� ��tt�ǽ������ڡ�
�ø���ʽ���Եõ���IMU������ϵ����������ϵ�ļ��ٶ�ӳ�䣬���ʽ�ڶ�����ʽ�����ٶȻ��ֻ��ۼ�Ϊ�ٶȣ�Ȼ�������ڲ����ļ��ٶȰ���������������������Ҫ��ȥ������
���ʽ11���ƣ���ʽ12���ٶȻ��ֳɾ��롣
��ͳ�������ڼ������⡣
���ٶȼ����������ƫ�ã����������Ϻ����Դӹ�ʽ10�м�ȥ����˸�ȷ�ı���ʽӦΪ��
��������һЩ�豸��������ƫ�ã�����ֶ�ͷ��
������ֵ���ֵ�ʵ�ַ�ʽ��ͨ��ʹ����ױ�����������ǰһ��ֵ�����л��֡����ǣ����������ƶ����⽫�����ش�������磬�������Ƚ����·�����
����1��
����ױ�������
����2��
�����Բ�ֵ��
��5���ڼ��ٶ�ΪΪ0.5 m/s2ʱ��λ�ƽ����4m����������ͼ7��ʾ��
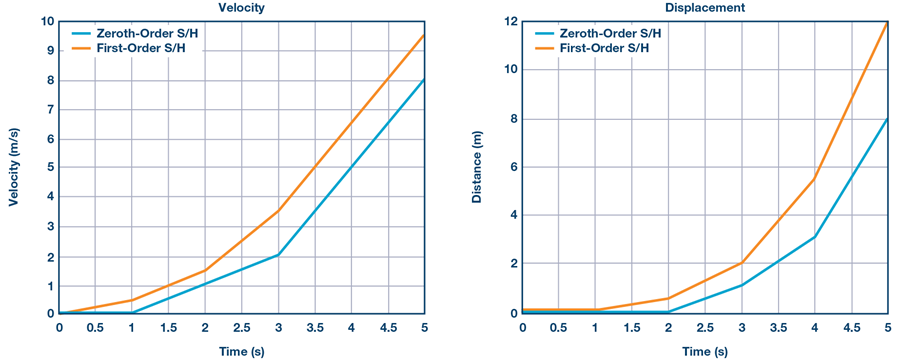
ͼ7. �ٶȼ����е���ױ�����һ���ַ����Ƚϡ�
����ǰ������ۣ�����Ӧ�ã��������˴�ͳ���������е������ط���
X ���Dz�ʹ�õ���������Ϊ��������ϵ���෴�����������ڼ�����ǰ��̬ʱ�����������������ó�ʼ��̬
��Ϊ��������ϵ��ͨ�����ַ�ʽ��ƫ�ú���������������ȡ�����繫ʽ14��ʾ��
��Ȼ��̬��ͬʱ������ƫ�ú��������������������ǾͲ���Ҫ�����Ƿֿ��ɵ����ķ���������ֱ��һ���ȥ���ǡ�������ױ�������һ�ײ�ֵ֮��ıȽϣ�����ʹ��һ��������ø�ȷ�Ļ��ֽ����
�˶�ѧģʽ�����ٸ��¼���(ZUPT)
ͨ��ʹ��IMU�ij�ʼֵ��Ϊ��������ϵ�����ǿ�������һ���ּ��ٶȵ�ƫ��Ӱ�졣Ȼ������ʹ������ʹ���豸֮ǰ���÷ֶ�ͷȷ����ƫ�ã���Ȼ����ȡ��������ʹ����һ���Ĵ�����������У��������Ҫ��������ԭ������ģ�һ��ƫ�ò��ȶ�������ζ������֮ǰ������ƫ�ò������ڵ�ʵ��ƫ�á������ٶ�������ߣ��ɼ��ٶ��������ֶ�����ǰ���ᵽ�IJ������Ի�ʹ���Ǽ���ľ�������Ư�ơ���ʹ����ֹͣ�ƶ������־�ֹ���Ӽ��ٶȻ��ֶ������ٶ���Ȼ���ڣ������Ի����ӡ�
Ҫ���������⣬������Ҫ�ҵ�һ��ͨ��ʹ��ZUPT���������ٶȵķ�����ZUPT����������Ӧ��������أ����������Ҫ���ϵͳ��Ӧ�õ��˶�ѧ������Ȼ�����һЩ�㷨�������Ƿ��ֵ��˶�ѧģʽԽ�࣬�����Խȷ��
����ͨ���ƶ�����SINSϵͳ��ת��������ʵ�顣�������ǵ��о��������ض�Ӧ�ã�����ʹ�������˶�ѧ���裺
���ں�λ���㣬��������ϵ��û��z���ƶ��������ƽ������ں�λ���㣬����������̬��⡣��Ȼ���������ڶ�ά�ռ����ƶ�ϵͳ��������������z����
����ת�䶼������ֹͣ��������ƶ�ʱ����ת�䣬�����Ϊ���������ٶ�������̬��⡣���ϵͳ�����ƶ������ٶȲ��ܱ��ֲ��䳬��500���롣�ٶȲ��ܱ��ֲ��䳬��2�롣�����������ƶ�������ת�Σ���˺����ֶ�ʹ���ر��ֲ��䳬��500���룬���Ҹ��˺��������ٳ����ƶ�ת��2�����ϡ���ʵ�ϣ���������������һ������ʵʩZUPT��
���ٶȲ��ܴ��ڡ�1 m/s2���ù�������һЩ�������ˣ�����������ʩ���������ϡ�����ܴ��������������
��ͼ8��ʾ����ϵͳ��X�������ƶ�ʱ��ͶӰ����������ϵ��Y����Ҳ��������ٶȣ����ֺ�Y�����ٶȲ���Ϊ�㣬����ζ�ż�ʹ����ֻ����X�������ƶ�����λ����ϵͳ��Ȼ������Ǵ���Y������
ͼ8. ��������ϵ����������ļ��ٶȡ�
���ڵ������˶�ѧ���裬���ǿ���ʹ��ZUPT������������ZUPT����֮��Ļ����ٶ���ͼ9��ʾ��
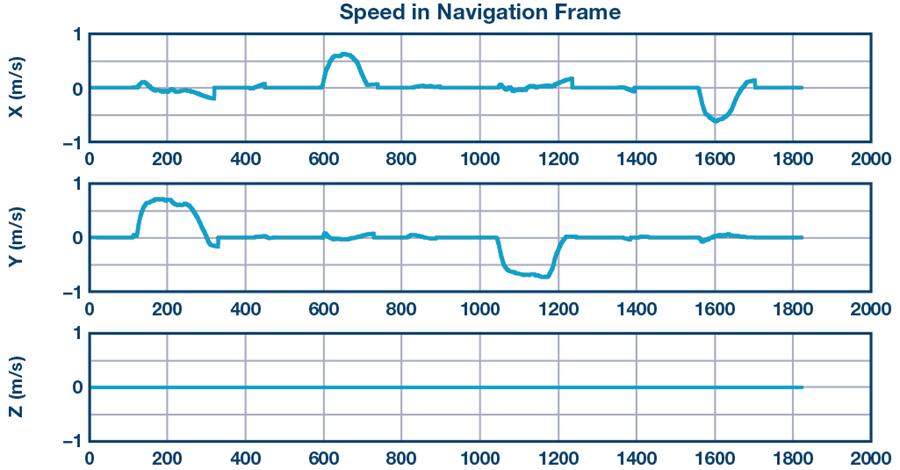
ͼ9. ��������ϵ������������ٶȡ�
��Ȼ����ʹ���˵��������裬��ǰ��ʾ�������Ȼ����ȫȡ�����������ȡ�����趨������ٶȺ����ٶȵ��ж���ֵ�����ǣ����������ѵõ�������
��Ȼʹ����ZUPT������ʱ��Ȼ���ﵽ���١������������ص��£�
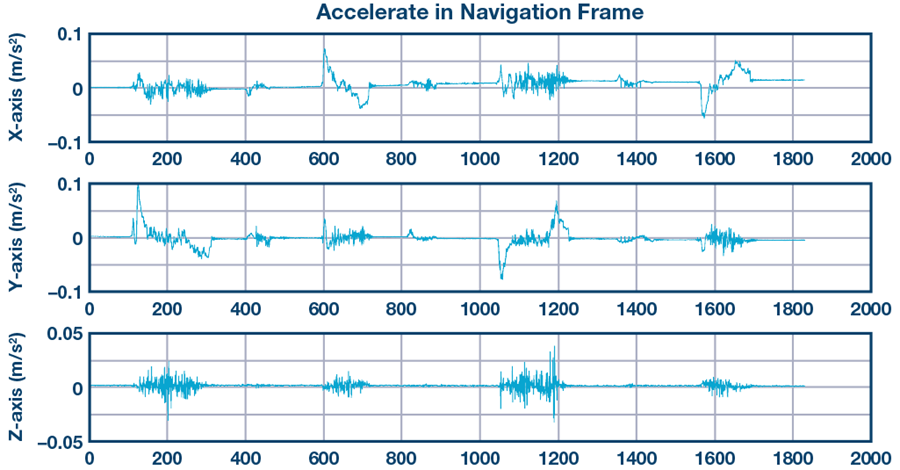
��������ZUPT��ȫ����ƫ�ò��ȶ������ٶ�������ߡ������������̬��һЩ�����������ͶӰ����������ϵ����������ϵ����ļ��ٶ���
��ͼ10Ϊ����ͼ10�е���ͼ��ADIS16470��ԭʼ���ݣ�������ϵ����ͼ10�е���ͼ��ͶӰ����������ϵ�ļ��ٶȡ����Կ�����ֹͣ�ƶ�ʱ��ͶӰ���ٶȲ�Ϊ�㡣�����������ڱ仯�����Ǵ˴���֮Ϊ����Ư�ơ�
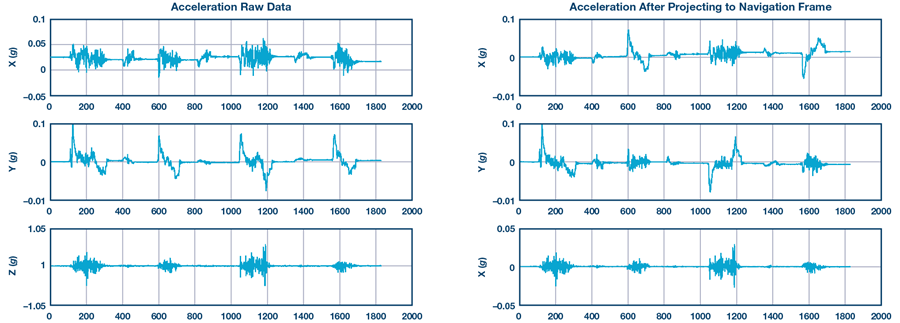
ͼ10. ������ϵ���͵�������ϵ���ң��ļ��ٶȡ�
Ϊ����������Ư�ƣ�������Ҫʵʱ�������ƫ��ƫ�ò���ͶӰ���ٶ��м�ȥ��ֵ�������ͼ11��ʾ
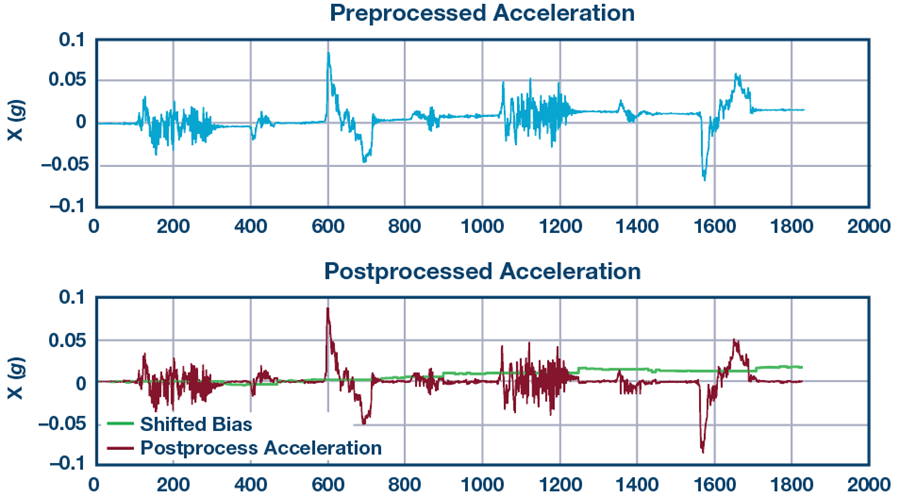
Figureͼ11. ����Ư������֮ǰ���ϣ���֮���£��ļ��ٶȡ�
��ͼ�ǻ���Ư������ǰ�ļ��ٶȣ���ͼ�е���ɫ�켣�����Ǽ���Ļ���ƫ�ƣ���ɫ�켣�ǻ���ƫ��������ļ��ٶȡ�
����ʹ��ͼ12�еĿ�ͼ��Ҫ������λ������̡����ǽ�������ϵ���ٶ�ab����̬ת�ƾ�������AHRS������
��DRϵͳ����ɺ����ǽ���õ�������ϵ�е�λ�á�
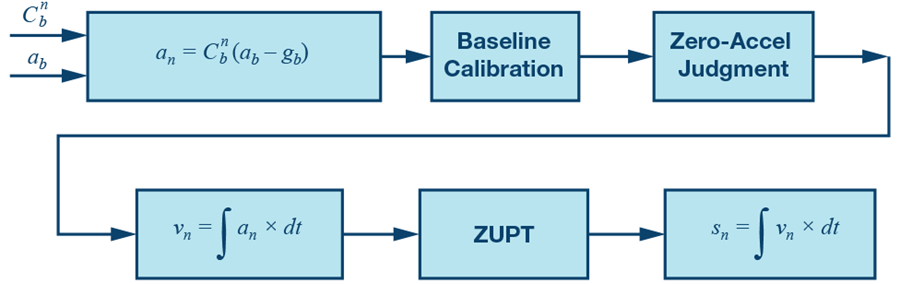
ͼ12. ��λ��������ͼ
ʵ���������
ʵ����
ʹ��SPI�˿ڣ����ǽ�ADIS16470�������RM3100�������������ӵ�ADI��˾��ADuCM4050��·�壬���������ǵ�ϵͳ����ͼ13��ʾ��ADuCM4050 �������ݸ�ʽ������ʱ��ͬ������ΪIMU�����̵��������ʲ�ͬ����Ȼ��ʹ��UART����������ݴ��䵽����������м��㣨����У��AHRS��DR��MATLAB������MATLAB®��ִ�С�
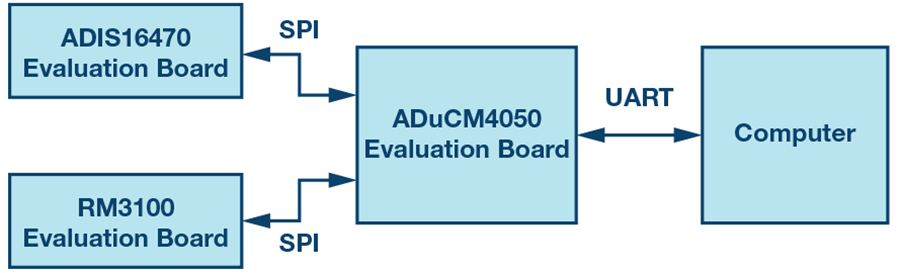
ͼ13. ʵ��ƽ̨���á�
��������ͼ��������ת���ϣ�����ʵ����������ת����Ȧ��
AHRS�������̬����Ԫ����ʽ��DCM��ʽ��ʾ����ͼ14��ʾ��
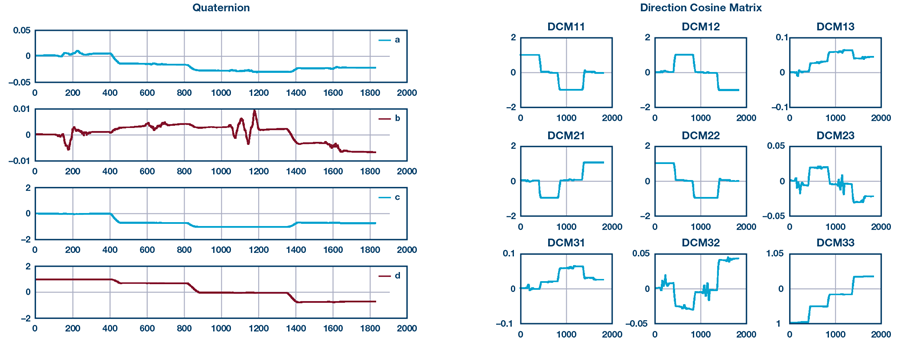
ͼ14. ��Ԫ����ʽ����DCM��ʽ���ң�����̬��
DR�������XYZλ�õĺ�λ����������άͼ��ͼ15��ʾ��
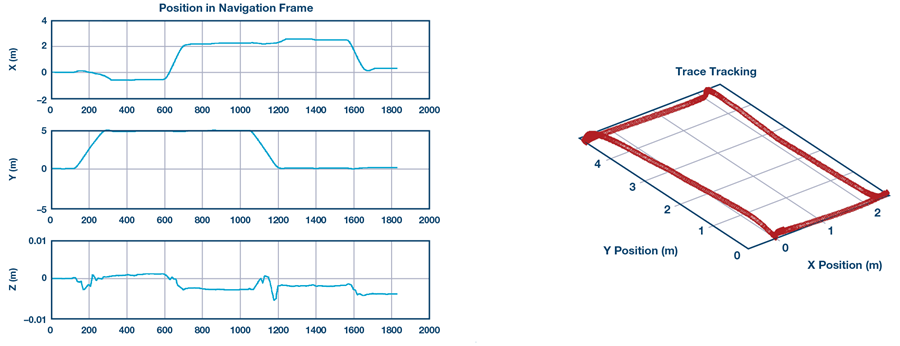
ͼ15. λ�ü�������
����
���Ľ�����ʹ��ADI��˾��IMU ADIS16470�͵شŴ�����RM3100���������ߵ�ϵͳ�Ļ������̣�����������ʹ�õ�У��AHRS��DR��������ƽ̨��ʵ�黷����������������£����ѽ�һ������ƽ̨���㷨��
�кܶ�������ڸ��ƽ�������磺
ʹ����̱���UWB�������������IMU�еļ��ٶȼ��ںϣ�����DR�л�ø�ȷ�ľ���ֵ��ʹ�ø����ӵ��˶�ѧģ�ͣ��Ӷ���AHRS��DR���ڴ�������ϵͳ�������������ԣ�����ϵͳ�������ٺͼ���ģ�͡�����ƽ���ȵȡ�����ζ��Ϊ����ߵ��������ȷ�ԣ���Ҫ��������ı߽�������X ʹ�ø�����ֵ���㷽��������������ɭ���������������ֵ��DR�н��л��֣�����ʹ��ţ�ٷ������Ǹ�˹-ţ�ٷ�����������MSE���̵ȡ�
��Ҳ����Ҫ��һ�㣬�����������з���INS��Ӧ�û��˶�ѧģ�ͽ�����ء����磬�����������ط�������ʵ�飺δ�̵�̺��ʵ���Һ����е�̺�İ칫�ҡ��������ʹ����ͬ�IJ�������DR�������ʾ����IJ��졣��ˣ���������Ӧ�ã����综�߸��١�AGV������ͣ����λ�����߶���ͬһӦ���еIJ�ͬ���������Ƕ���Ҫȫ���˽����˶�ѧģ�͡�