- ЗЧICЙиМќДЪ
ЩюлкЪЂЫМШ№ДДПЦММгаЯоЙЋЫО

- гЊвЕжДееЃКвбЩѓКЫОгЊФЃЪНЃКУГвз/ДњРэ/ЗжЯњЫљдкЕиЧјЃКЙуЖЋ Щюлк
ЪеВиБОЙЋЫО ШЫЦјЃК877871
ЦѓвЕЕЕАИ
- ЯрЙижЄМўЃК

- ЛсдБРраЭЃКЦеЭЈЛсдБ
- Н№ЯШЩњ

- ЕчЛАЃК13661102955
- ЪжЛњЃК13661102955
- ЕижЗЃКЩюлкЪаСњИкЧјВМСњТЗ529КХН№УёАВЩЬЮёТЅ13D
- E-mailЃК2355647911@qq.com
ВњЦЗЗжРр






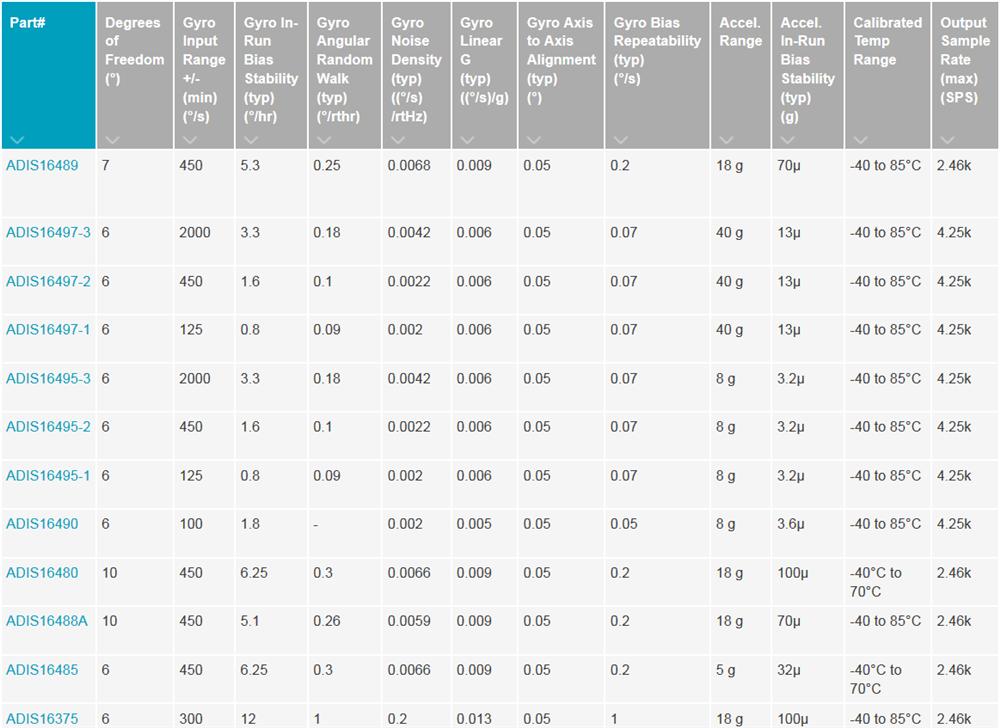
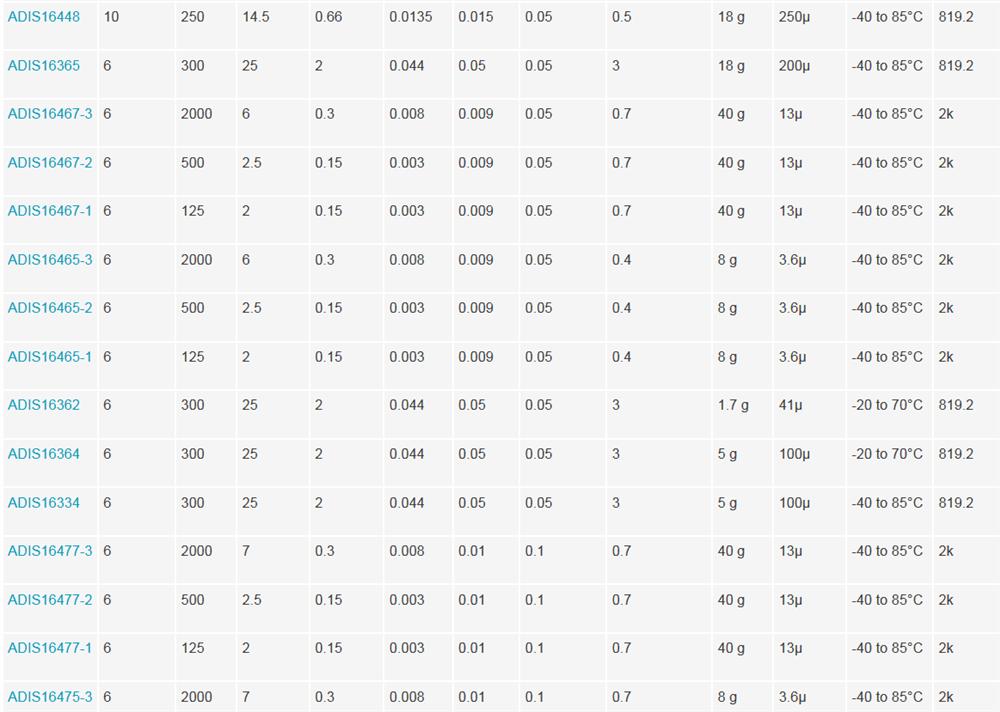
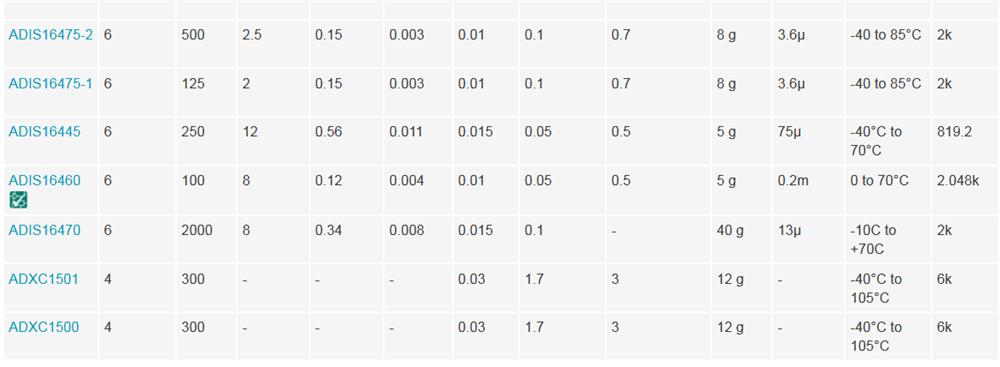
ADIS16497-2ОЋУмЮЛвЦЭЦЫуIMUДЋИаЦї
ADIS16497-2
ADIЃЈбЧЕТХЕЃЉ
6-axis
X, Y, Z
8 g
32 bit
ML-24
ВњЦЗаХЯЂ
ЙпадВтСПЕЅдЊIMUДЋИаЦї
ЃЈгЂЮФЃКInertial measurement unitЃЌМђГЦ IMUЃЉЪЧВтСПЮяЬхШ§жсзЫЬЌНЧ(ЛђНЧЫйТЪ)вдМАМгЫйЖШЕФзАжУЁЃ
ЮЊСЫЬсИпПЩППадЃЌЛЙПЩвдЮЊУПИіжсХфБИИќЖрЕФДЋИаЦїЁЃвЛАуЖјбдIMUвЊАВзАдкБЛВтЮяЬхЕФжиаФЩЯЁЃ
IMUДѓЖргУдкашвЊНјаадЫЖЏПижЦЕФЩшБИЃЌШчЦћГЕКЭЛњЦїШЫЩЯЁЃвВБЛгУдкашвЊгУзЫЬЌНјааОЋУмЮЛвЦЭЦЫуЕФГЁКЯЃЌШчЧБЭЇЁЂЗЩЛњЁЂЕМЕЏКЭКНЬьЦїЕФЙпадЕМКНЩшБИЕШЁЃADIS16497-2 ADIS16497-2 ADIS16497-2
РћгУШ§жсЕиДХНтНсКЯШ§жсМгЫйЖШМЦЃЌЪмЭтСІМгЫйЖШгАЯьКмДѓЃЌдкдЫЖЏ/еёЖЏЕШЛЗОГжаЃЌЪфГіЗНЯђНЧЮѓВюНЯДѓ,ДЫЭтЕиДХДЋИаЦїгаШБЕуЃЌЫќЕФВЮееЮяЪЧЕиДХГЁЕФДХСІЯп,ЕиДХЕФЬиЕуЪЧЪЙгУЗЖЮЇДѓЃЌЕЋЧПЖШНЯЕЭЃЌдМСуЕуМИИпЫЙЃЌЗЧГЃШнвзЪмЕНЦфЫќДХЬхЕФИЩШХЃЌ
ШчЙћШкКЯСЫZжсЭгТнвЧЕФЫВЪБНЧЖШЃЌОЭПЩвдЪЙЯЕЭГЪ§ОнИќМгЮШЖЈЁЃМгЫйЖШВтСПЕФЪЧжиСІЗНЯђЃЌдкЮоЭтСІМгЫйЖШЕФЧщПіЯТЃЌФмзМШЗЪфГіROLL/PITCHСНжсзЫЬЌНЧЖШЁЃ
ЙпадВтСПзАжУIMUЪєгкНнСЊЪНЙпЕМЃЌИУЯЕЭГгаСНИіМгЫйЖШДЋИаЦїгыШ§ИіЫйЖШДЋИаЦїЃЈЭгТнЃЉзщГЩЃЌМгЫйЖШМЦгУРДИаЪмЗЩЛњЯрЖдгкЕиДЙЯпЕФМгЫйЖШЗжСПЃЌЫйЖШДЋИаЦїгУРДИаЪмЗЩЛњЕФНЧЖШаХЯЂЃЌИУзгВПМўжївЊгаСНИіA/DзЊЛЛЦїAD7716BSгы64KЕФE/EPROMДцДЂЦїX25650ЙЙГЩЃЌA/DзЊЛЛЦїВЩгУIMUИїДЋИаЦїЕФФЃФтБфСПЃЌзЊЛЛЮЊЪ§зжаХЯЂКѓОЙ§CPUМЦЫуКѓЪфГіЗЩЛњИЉбіНЧЖШЁЂЧуаБНЧЖШгыВрЛЌНЧЖШЃЌE/EPROMДцДЂЦїжївЊДцДЂСЫIMUИїДЋИаЦїЕФЯпадЧњЯпЭМгыIMUИїДЋИаЦїЕФМўКХгыађКХЃЌВПЦЗдкИеПЊЛњЪБЃЌЭМЯёДІРэЕЅдЊЖСШЁE/EPROMФкЕФЯпадЧњЯпВЮЪ§ЮЊКѓајНЧЖШМЦЫуЬсЙЉГѕЪМаХЯЂЁЃ
ADIS16497-2
ЭгТнвЧЪфГіНЧЫйЖШЃЌЪЧЫВЪБСПЃЌНЧЫйЖШдкзЫЬЌЦНКтЩЯЪЧВЛФмжБНгЪЙгУЃЌашвЊНЧЫйЖШгыЪБМфЛ§ЗжМЦЫуНЧЖШЃЌЕУЕНЕФНЧЖШБфЛЏСПгыГѕЪМНЧЖШЯрМгЃЌОЭЕУЕНФПБъНЧЖШЃЌЦфжаЛ§ЗжЪБМфDtдНаЁЃЌЪфГіНЧЖШдН,ЕЋЭгТнвЧЕФдРэОіЖЈСЫЫќЕФВтСПЛљзМЪЧздЩэЃЌВЂУЛгаЯЕЭГЭтЕФВЮееЮяЃЌМгЩЯDtЪЧВЛПЩФмЮоЯоаЁ,ЫљвдЛ§ЗжЕФРлЛ§ЮѓВюЛсЫцзХЪБМфСїЪХбИЫйдіМгЃЌжеЕМжТЪфГіНЧЖШгыЪЕМЪВЛЗћЃЌЫљвдЭгТнвЧжЛФмЙЄзїдкЯрЖдНЯЖЬЕФЪБМфГпЖШФкЁЃ